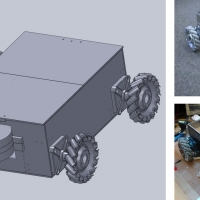
In this project, Smart Omnigro, an unmanned ground vehicle to act as a tool for intelligence, surveillance and reconnaissance which has obstacle avoidance and smartphone control functions is developed. Omni-directional wheels are used for steering and motion strategy. Software algorithm using potential field utilizing GPS and untrasonic sensor signals, which give the information of the robot coordinate and obstacle positions around the robot respectively, is developed for path planning avoiding obstacles. A noble control interface is developed to monitor and control the robot using smartphones through the internet. As a result of the successful development in this project, the robot incorporating with an unmmend aerial vehicle won the first place at the RICC 2011 competition.
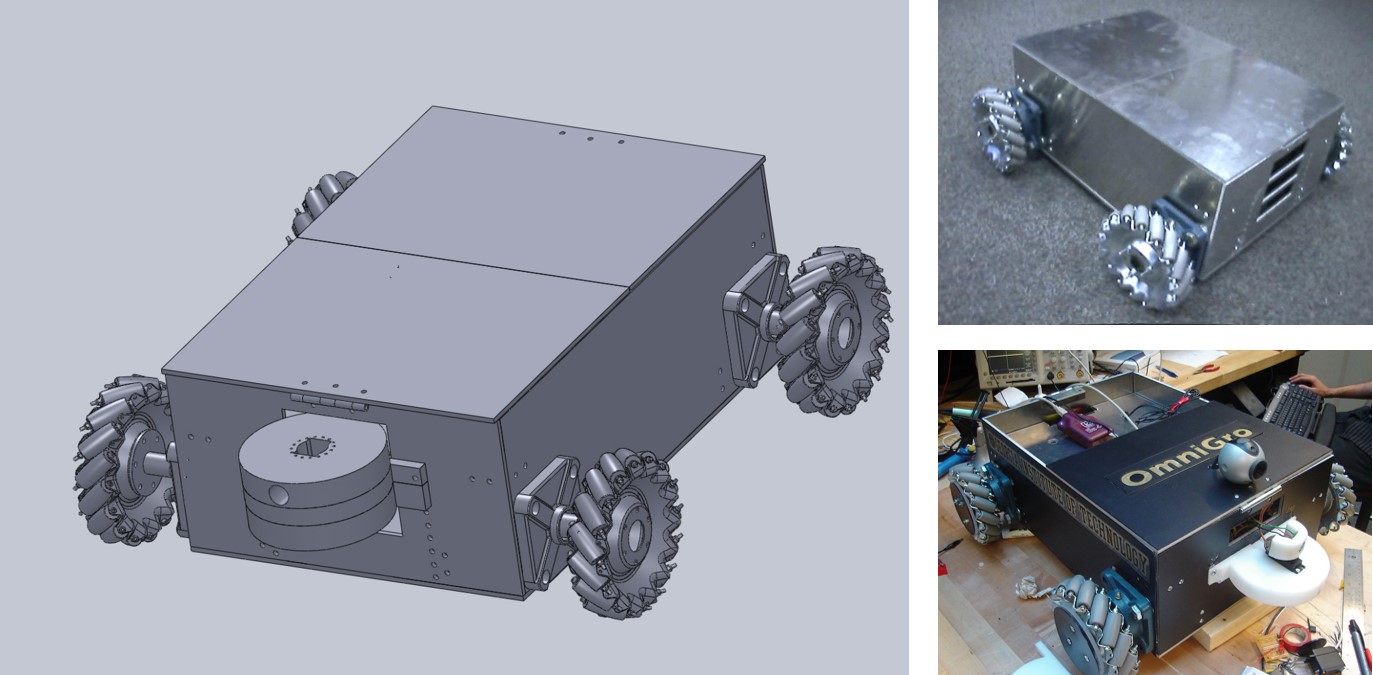
Smart Omnigro
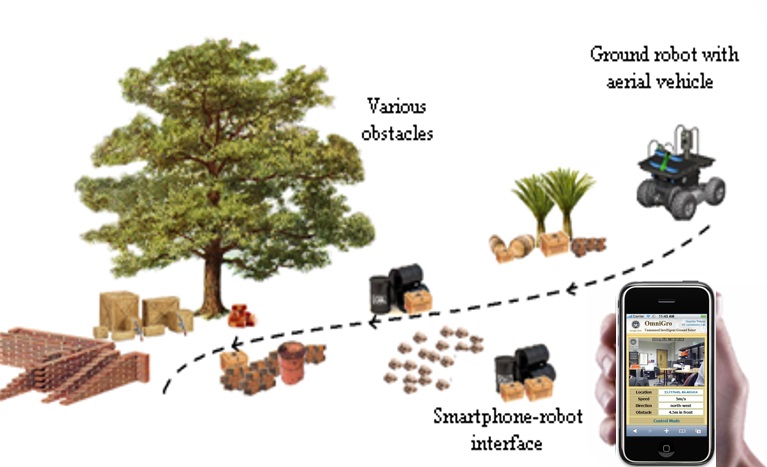
Smartphone Control for Smart Omnigro